200707
進捗確認
西澤
- Vitis AIの導入完了
- 自宅ではなく研究室のwi-fiならインストールに成功した
- 実際に論文に書く際にはFPGAの回路図がVitis AIでは確認できないのではないか
- 別のコンポーネントをFPGAで実装する必要がある.
- PWMを実装する?(高崎)
- LEDで現在の状態を表示する?
- 別のコンポーネントをFPGAで実装する必要がある.
役割分担
- 山下君
- VHDL
- 深田君
- ROS
議論
- Ultra96をもう一台買う?
- (07/09 追記)買いました.
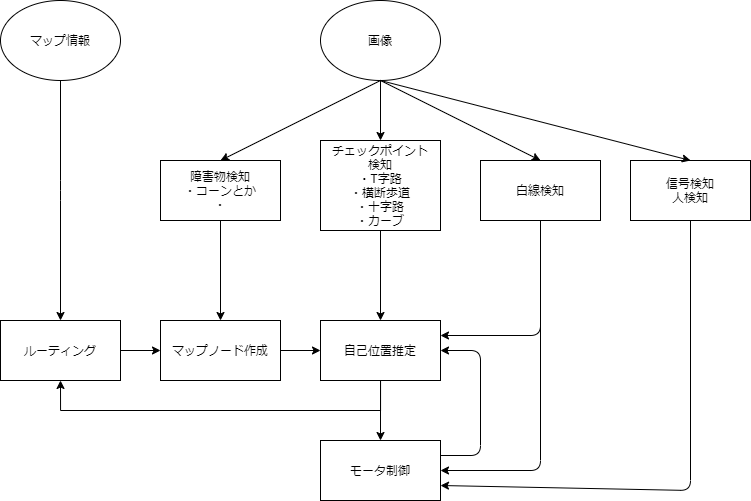
- 全体システムのフローチャートはどうするか(写真)
- 若泉手法は正確かつ安定しそう,ただし実装や実行時間がかかりそう
- 高崎手法は実装が簡単,マップとの整合性が取れなくなるかも
若泉君
- ノードがマップ全体に散りばめられている
- 現在位置から行きたい方向のノードを選択し進む
- 障害物があった場合反対車線にもノードがあるマップと差し替え,マップ上の場所を記憶しながら進む
次回までにやること
次回ミーティング 7/21 13:00~
山下君
- 画像処理?(T字路検知)
- チェックポイント
- Ultra96をいじる
- Vivadoを触ってみる
深田君
- ROSをいじる
- 高崎君と勉強会
高崎君
- 白線検知を実装
- ROS
- 機体を走らせたい
- PWMを実装
若泉君
- マップマッチングで白線に沿って動くプログラムを考える
西澤
- Vitis AI(機械学習)を触って障害物を検知する.(導入)
- Vivad 2019 でPWMを実装